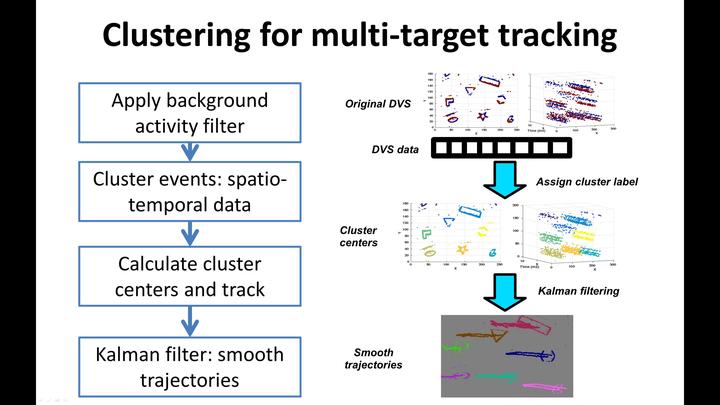
Real-time clustering and tracking for event-based sensors
This package implements a clustering and tracking using Kalman filters for DVS data (event based camera).
Getting Started
Clone or download the project. After that, first source your ROS distro files:
$ source /opt/ros/<your_distro>/setup.bash
And follow the next files to compile the package:
$ mkdir -p ~/dvs_clustering_tracking/src
$ cd ~/dvs_clustering_tracking/
$ catkin_make
After this, you will have a copy of the project for testing.
Prerequisites
In order to install the project, you will need a ROS distribution running in your platform. This project was developed and tested using kinetic. See more about the installation and tutorial examples in the ROS website.
Installing
In order to install all the dependencies you will have to install:
rpg_dvs_ros: where you will requiredvs_ros_driver(and thendvs_driver),dvs_msgs,dvs_renderer,libcaer_catkin(and thenlibcaer)catkin_simple
Running the tests
After the compiling the project code, source the setup.bash file
:~/dvs_clustering_tracking$ source devel/setup.bash
Next, we will show two examples for running some of the tests:
Running the dvs_renderer
If you do not have the DVS camera and want to run a file, simply run:
:~/dvs_clustering_tracking$ rosbag play ~/bagfiles/shapes_rotation.bag -l
where in ~/bagfiles we have the rosbag file with dvs events ([rosbag files dataset] (http://rpg.ifi.uzh.ch/davis_data.html))
Or, if you have your own camera, just run in a different console (you’ll need to source again the setup.bash files in this new console):
$ roslaunch dvs_renderer dvs_mono.launch
Running dvs_meanshift
In case there is no attached DVS, just run the same rosbag example:
:~/dvs_clustering_tracking$ rosbag play ~/bagfiles/shapes_rotation.bag -l
where in ~/bagfiles we have the rosbag file with dvs events ([rosbag files dataset] (http://rpg.ifi.uzh.ch/davis_data.html))
Then, run in a different console (you’ll need to source again the setup.bash files in this new console):
$ roslaunch dvs_meanshift dvs_segmentation.launch
Publications
If you use this work in an academic context, please cite the following publication:
- F. Barranco, C. Fermuller, E. Ros: Real-time clsutering for multi-target tracking using event-based sensors. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, 2018. (PDF)
Authors
- Francisco Barranco - University of Granada Please report problems, bugs, or suggestions to fbarranco_at_ugr_dot_es (Replace at by @ and dot by .).
Acknowledgments
- This work was supported by a Spanish Juan de la Cierva grant (IJCI-2014-21376), partially funded by MINECO-FEDER TIN2016-81041-R grant, the EU HPB-SGA2 grant (H2020-RIA 785907), the National Science Foundation under grant SMA 1540916, and the NG-UMD seed grant (Object Motion Analysis for Autonomous Systems).
License
Copyright (C) 2018 Francisco Barranco, 01/09/2018, University of Granada.
This program is free software: you can redistribute it and/or modify it under the terms of the GNU General Public License as published by the Free Software Foundation, either version 3 of the License.
This program is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU General Public License for more details.
You should have received a copy of the GNU General Public License along with this program. If not, see http://www.gnu.org/licenses/.