La interpolación es un método para aproximar una función a partir de ciertos
datos de la misma. El aproximante se denomina, en este caso, interpolante y debe verificar los datos conocidos de la función.
Por ejemplo, si el valor de una función en el punto ![]() es
es ![]() , en el punto
, en el punto ![]() es
es ![]() y en el punto
y en el punto ![]() es
es ![]() , entonces el polinomio
, entonces el polinomio ![]() es su
interpolante en el espacio
es su
interpolante en el espacio ![]() (de los polinomios de grado
menor o igual que
(de los polinomios de grado
menor o igual que ![]() ). Otros interpolantes de esa función en los puntos
). Otros interpolantes de esa función en los puntos ![]()
![]() y
y ![]() en espacios de
funciones trigonométricas son
en espacios de
funciones trigonométricas son ![]() ,
, ![]() , etc.
, etc.
Todos los datos del ejemplo anterior corresponden a valores de la función en puntos diferentes. Se dice que son lagrangianos. A veces parte de los datos corresponden a derivadas de la función; entonces se habla de datos de tipo Hermite.
En la interpolación lineal los datos conocidos deben corresponder a funcionales lineales aplicados a la función
que deseamos interpolar. Un funcional es una aplicación de
un conjunto de funciones en ![]() . En el ejemplo anterior los
tres funcionales
. En el ejemplo anterior los
tres funcionales ![]()
![]() y
y
![]() están
definidos de la siguiente forma:
están
definidos de la siguiente forma: ![]() ,
, ![]() y
y ![]() . Son lineales, lo mismo que
le ocurre al funcional
. Son lineales, lo mismo que
le ocurre al funcional ![]() definido por
definido por ![]() (derivada de orden
(derivada de orden ![]() en el punto
en el punto ![]() ) o al definido por
) o al definido por ![]() Sin embargo, no es lineal
el funcional
Sin embargo, no es lineal
el funcional ![]() definido por
definido por ![]() o el
definido por
o el
definido por ![]() , etc.
, etc.
El número de datos que usaremos en la interpolación será finito y buscaremos
el interpolante en un espacio vectorial, ![]() , cuya dimensión coincidirá
con el número de datos y sus funciones serán sencillas de manejar; es decir,
sencillas de derivar, evaluar, integrar y almacenar en un ordenador. Los
espacios polinómicos son los primeros candidatos para la interpolación.
, cuya dimensión coincidirá
con el número de datos y sus funciones serán sencillas de manejar; es decir,
sencillas de derivar, evaluar, integrar y almacenar en un ordenador. Los
espacios polinómicos son los primeros candidatos para la interpolación.
En general, si los datos conocidos son ![]() ,
, ![]() ,
, ![]() ,
, ![]() y el espacio vectorial
y el espacio vectorial ![]() , donde buscamos el
interpolante, tiene dimensión
, donde buscamos el
interpolante, tiene dimensión ![]() y una base está formada por
las funciones
y una base está formada por
las funciones ![]() ,
, ![]() ,
, ![]() ,
, ![]() , el
interpolante,
, el
interpolante, ![]() , se
escribirá como
, se
escribirá como  donde los coeficientes
donde los coeficientes ![]() deben ser
calculados forzando a que
deben ser
calculados forzando a que ![]() interpole los datos
conocidos de
interpole los datos
conocidos de ![]() , es decir,
imponiendo que se verifiquen las igualdades
, es decir,
imponiendo que se verifiquen las igualdades  Se obtiene, pues, el sistema lineal
de orden
Se obtiene, pues, el sistema lineal
de orden ![]()
 que
será compatible determinado si el determinante de la matriz de coeficientes,
que
será compatible determinado si el determinante de la matriz de coeficientes,
![]() (llamado
determinante de Gram), es diferente de cero. En tal caso se dice que el
problema es unisolvente (solución única).
(llamado
determinante de Gram), es diferente de cero. En tal caso se dice que el
problema es unisolvente (solución única).
Es interesante conocer espacios donde sean unisolventes datos de interpolación que se conocen habitualmente. Por ejemplo datos lagrangianos, es decir valores de la función en puntos diferentes, como las dadas en el ejemplo inicial. También interesa disponer de fórmulas que permitan obtener el interpolante fácilmente en los problemas unisolventes.
En este capítulo usaremos como espacios interpoladores los de tipo polinómico de grado bajo, obteniendo la interpolación polinómica; y daremos las fórmulas de Lagrange y de Newton para obtener el interpolante.
Lógicamente, la unisolvencia de un problema de interpolación depende sólo de
los funcionales lineales y del espacio ![]() . No depende de la base de
. No depende de la base de
![]() . Por tanto, para
probar la unisolvencia usaremos en cada caso la base que consideremos más
apropiada para ver la no nulidad del determinante de Gram.
. Por tanto, para
probar la unisolvencia usaremos en cada caso la base que consideremos más
apropiada para ver la no nulidad del determinante de Gram.
En los problemas que damos a continuación, el espacio interpolador, ![]() , será siempre
, será siempre ![]() , es
decir, el de los polinomios de grado menor o igual que
, es
decir, el de los polinomios de grado menor o igual que ![]() (suponiendo que el número de
datos que hay que interpolar es
(suponiendo que el número de
datos que hay que interpolar es ![]() ).
).
En este caso los datos son valores de la función en ![]() puntos diferentes. Es decir,
si los puntos de interpolación, que sólo por comodidad los consideramos
ordenados, son
puntos diferentes. Es decir,
si los puntos de interpolación, que sólo por comodidad los consideramos
ordenados, son  debemos conocer los valores
debemos conocer los valores ![]() ,
, ![]() , lo que
implica que los funcionales son
, lo que
implica que los funcionales son ![]() ,
, ![]() . Este es
el problema de interpolación polinómica lagrangiana. Es
unisolvente, como puede comprobarse sin más que tomar la base
. Este es
el problema de interpolación polinómica lagrangiana. Es
unisolvente, como puede comprobarse sin más que tomar la base ![]() de
de ![]() y
evaluar el determinante de Gram correspondiente, que es triangular inferior.
y
evaluar el determinante de Gram correspondiente, que es triangular inferior.
Por ejemplo, si ![]() dicho determinante es
dicho determinante es 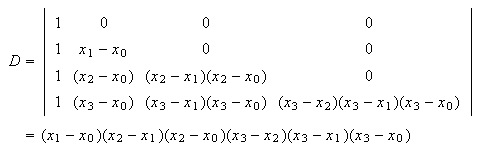 y es no
nulo al ser distintos los puntos de interpolación. Lo mismo sucede en caso
general.
y es no
nulo al ser distintos los puntos de interpolación. Lo mismo sucede en caso
general.
En este caso los datos que se consideran son el valor de la función y el de
su primera derivada en cada punto, es decir, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() . En total
. En total ![]() datos. Por tanto
datos. Por tanto
![]() .
.
Si consideramos la base de ![]() dada por
dada por  y la
sometemos a los funcionales, que son
y la
sometemos a los funcionales, que son ![]() ,
, ![]() ,
, ![]() , obtenemos,
de nuevo, un determinante triangular inferior sin elementos nulos en la
diagonal, luego el problema de Hermite clásico también es unisolvente.
, obtenemos,
de nuevo, un determinante triangular inferior sin elementos nulos en la
diagonal, luego el problema de Hermite clásico también es unisolvente.
Entendemos como Hermite generalizado un problema cuyos datos, en cada punto,
son de la forma ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() . Los valores
de la derivada máxima,
. Los valores
de la derivada máxima, ![]() , pueden variar de un punto a
otro. Es decir, la única condición es que si en un punto se da como dato el
valor de cierta derivada de
, pueden variar de un punto a
otro. Es decir, la única condición es que si en un punto se da como dato el
valor de cierta derivada de ![]() en ese punto también se
tienen que dar los valores de todas las derivadas de menor orden en dicho punto.
Quedaría excluido de este tipo de problemas, por ejemplo, el que tiene por datos
en ese punto también se
tienen que dar los valores de todas las derivadas de menor orden en dicho punto.
Quedaría excluido de este tipo de problemas, por ejemplo, el que tiene por datos
![]() ,
,
![]() y
y ![]() , pues no aparece
, pues no aparece ![]() .
Este ejemplo corresponde a una familia de problemas, más general, llamada de
Hermite-Birkhoff.
.
Este ejemplo corresponde a una familia de problemas, más general, llamada de
Hermite-Birkhoff.
El número total de datos en un problema de Hermite generalizado es ![]() y la unisolvencia está
garantiza en el espacio
y la unisolvencia está
garantiza en el espacio ![]() La demostración vuelve a ser
inmediata si se elige una base adecuada de este espacio, usando productos de
potencias de
La demostración vuelve a ser
inmediata si se elige una base adecuada de este espacio, usando productos de
potencias de ![]() ,
como en los casos anteriores. Concretamente, una base adecuada para que el
determinante de Gram sea triangular es
,
como en los casos anteriores. Concretamente, una base adecuada para que el
determinante de Gram sea triangular es 
Por ejemplo, si los datos que se desea interpolar son 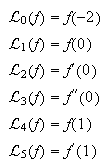 una
base adecuada para probar la unisolvencia es
una
base adecuada para probar la unisolvencia es  ya que al evaluar los funcionales
resulta el determinante no nulo
ya que al evaluar los funcionales
resulta el determinante no nulo 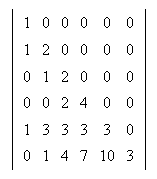
Es un caso particular de interpolación de Hermite generalizada, en el que los
datos están todos referidos a un solo punto, digamos ![]() , en el que
conocemos el valor de la función y el de varias derivadas sucesivas, esto es
, en el que
conocemos el valor de la función y el de varias derivadas sucesivas, esto es
![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() . Los funcionales lineales
son
. Los funcionales lineales
son ![]() ,
,![]()
![]() . La
unisolvencia en
. La
unisolvencia en ![]() puede verse de forma
inmediata a partir de la base canónica,
puede verse de forma
inmediata a partir de la base canónica, ![]() , pues el determinante de
Gram correspondiente es
, pues el determinante de
Gram correspondiente es 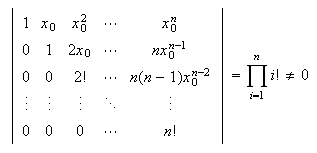
En primer lugar, observemos que si ![]() ,
, ![]() ,
, ![]() ,
, ![]() son
son ![]() valores reales distintos,
pertenecien-tes a un intervalo
valores reales distintos,
pertenecien-tes a un intervalo ![]() , y
, y ![]() es una función real
definida en ese intervalo, los polinomios
es una función real
definida en ese intervalo, los polinomios ![]() de grado
de grado ![]() definidos por
definidos por  satisfacen las igualdades
satisfacen las igualdades  Por tanto, el polinomio definido por
Por tanto, el polinomio definido por
 es de grado menor o igual que
es de grado menor o igual que ![]() y en cada nodo
y en cada nodo ![]() toma el valor
toma el valor
![]() . Por tanto, debido
a la unisolvencia,
. Por tanto, debido
a la unisolvencia, ![]() es el polinomio de
interpolación de Lagrange de la función
es el polinomio de
interpolación de Lagrange de la función ![]() en los nodos
en los nodos ![]() ,
, ![]() , y la
representación (ec09.1) es la fórmula de
Lagrange para el polinomio de interpolación con datos lagrangianos.
, y la
representación (ec09.1) es la fórmula de
Lagrange para el polinomio de interpolación con datos lagrangianos.
La fórmula de Lagrange es aplicable a otros problemas de interpolación en los
que los datos no sean lagrangianos, incluso aunque el espacio interpolador ![]() no sea
no sea ![]() Pero los
Pero los ![]() ,
obviamente, cambian ya que tienen que pertenecer al nuevo espacio interpolador.
Es posible que su cálculo deje de ser inmediato. Concretamente, si los datos del
problema corresponden a unos funcionales
,
obviamente, cambian ya que tienen que pertenecer al nuevo espacio interpolador.
Es posible que su cálculo deje de ser inmediato. Concretamente, si los datos del
problema corresponden a unos funcionales ![]() ,
, ![]() , que
conducen a unisolvencia en un espacio
, que
conducen a unisolvencia en un espacio ![]() de dimensión
de dimensión ![]() , calculamos la función
, calculamos la función
![]() que verifica
que verifica
 Análogamente, calculamos
Análogamente, calculamos ![]() cambiando la posición del
valor
cambiando la posición del
valor ![]() en la
columna de términos independientes, a la segunda ecuación, tercera, etc. Es
decir,
en la
columna de términos independientes, a la segunda ecuación, tercera, etc. Es
decir, ![]() es la solución del sistema
es la solución del sistema ![]() ,
, ![]() . Las
funciones
. Las
funciones ![]() existen y son únicas debido a la unisolvencia del problema de partida.
existen y son únicas debido a la unisolvencia del problema de partida.
Ahora, si nuestro problema de interpolación consiste en calcular ![]() tal que
tal que
![]() ,
, ![]() ,
, ![]() , entonces la solución es
, entonces la solución es
Efectivamente, ![]() y
y ![]() ,
, ![]() ,
, ![]() , luego es la solución
(debido a la unisolvencia). Asimismo, el interpolante de una función de
, luego es la solución
(debido a la unisolvencia). Asimismo, el interpolante de una función de ![]() es la propia función. Por
tanto las funciones
es la propia función. Por
tanto las funciones ![]() constituyen una base de
constituyen una base de
![]() . Se denomina base de Lagrange, y a la fórmula (ec09.2)
se le denomina fórmula de Lagrange.
. Se denomina base de Lagrange, y a la fórmula (ec09.2)
se le denomina fórmula de Lagrange.
La fórmula de Lagrange es válida para resolver cualqier problema de
interpolación unisolvente, sea polinómico o no, y para cualquier tipo de datos,
pero requiere calcular previamente la base de Lagrange. Luego, salvo que ésta
sea inmediata, como ocurre con el problema de interpolación polinómica con datos
lagrangianos, tendremos que resolver ![]() problemas, es decir
problemas, es decir ![]() sistemas lineales, de igual
tamaño. No es práctico para reslover un solo problema. Ahora bien, en ocasiones
tenemos que interpolar muchas funciones en un mismo espacio y de ellas conocemos
los mismos datos. En tal caso, la base de Lagrange es la misma para todos los
problemas y, por tanto, sólo hay que obtenerla una vez.
sistemas lineales, de igual
tamaño. No es práctico para reslover un solo problema. Ahora bien, en ocasiones
tenemos que interpolar muchas funciones en un mismo espacio y de ellas conocemos
los mismos datos. En tal caso, la base de Lagrange es la misma para todos los
problemas y, por tanto, sólo hay que obtenerla una vez.
En el caso de la interpolación polinómica la base de Lagrange está formada
por ![]() polinomios de
grado
polinomios de
grado ![]() . Si
después hay que evaluar el interpolante en muchos puntos, por ejemplo para
dibujar su gráfica, se tarda más tiempo que si la base contiene polinomios de
todos los grados, como ocurre con la base canónica y con las utilizadas para
probar la unisolvencia de los problemas anteriores (que son las bases de Newton). Otro inconveniente importante de la base de
Lagrange es que una modificación en los datos, por eliminación o adición de
alguno, hace inservibles los polinomios de Lagrange ya calculados.
. Si
después hay que evaluar el interpolante en muchos puntos, por ejemplo para
dibujar su gráfica, se tarda más tiempo que si la base contiene polinomios de
todos los grados, como ocurre con la base canónica y con las utilizadas para
probar la unisolvencia de los problemas anteriores (que son las bases de Newton). Otro inconveniente importante de la base de
Lagrange es que una modificación en los datos, por eliminación o adición de
alguno, hace inservibles los polinomios de Lagrange ya calculados.
La fórmula de Newton surge de la idea de aprovechar el polinomio que
interpola ![]() datos,
datos,
![]() , para
construir el polinomio,
, para
construir el polinomio, ![]() , que interpola en
, que interpola en ![]() datos (los
datos (los ![]() anteriores y otro nuevo).
anteriores y otro nuevo).
Supongamos, en primer lugar, que los datos son todos lagrangianos, es decir
conocemos los valores ![]() ,
, ![]() ,
, ![]() ,
, ![]() , donde
, donde ![]() si
si
![]() , y deseamos
obtener el polinomio
, y deseamos
obtener el polinomio ![]() tal que
tal que ![]() ,
, ![]() .
.
Sea ![]() tal que
tal que
 Deseamos obtener el polinomio de interpolación de los datos
Deseamos obtener el polinomio de interpolación de los datos ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() , escribiéndolo como
, escribiéndolo como  donde
donde
![]() . Ello obliga a que
. Ello obliga a que
![]() ,
, ![]() y, por
tanto,
y, por
tanto,  siendo
siendo ![]() una constante.
una constante.
Finalmente, ![]() debe interpolar también el
dato en
debe interpolar también el
dato en ![]() , con
lo cual
, con
lo cual  de lo que se deduce que
de lo que se deduce que  valor
que recibe el nombre de diferencia dividida (de los datos
considerados).
valor
que recibe el nombre de diferencia dividida (de los datos
considerados).
El proceso para calcular el interpolante en los ![]() puntos se puede llevar a
cabo en
puntos se puede llevar a
cabo en ![]() etapas.
En primer lugar se calcula el polinomio,
etapas.
En primer lugar se calcula el polinomio, ![]() , que interpola a
, que interpola a ![]() sólo en el punto
sólo en el punto ![]() ; es
; es ![]() A
continuación se obtiene
A
continuación se obtiene ![]() a partir de la expresión
a partir de la expresión
 siendo
siendo ![]() .
Después se obtiene
.
Después se obtiene ![]() como
como  imponiendo que interpole en
imponiendo que interpole en ![]() . Se continúa este
procedimiento hasta disponer de
. Se continúa este
procedimiento hasta disponer de ![]() . Para unificar la notación,
pongamos
. Para unificar la notación,
pongamos ![]() , con lo
cual el polinomio
, con lo
cual el polinomio ![]() queda como
queda como  que es
la fórmula de Newton para la interpolación polinómica con
datos lagrangianos. El valor de la diferencia dividida
que es
la fórmula de Newton para la interpolación polinómica con
datos lagrangianos. El valor de la diferencia dividida ![]() depende sólo
del valor de la función interpolada,
depende sólo
del valor de la función interpolada, ![]() , en el nodo
, en el nodo ![]() . Por ello a
veces se nota por
. Por ello a
veces se nota por ![]() . El valor de
. El valor de ![]() depende sólo de
los valores de
depende sólo de
los valores de ![]() en los nodos
en los nodos ![]() y
y ![]() (también se
suele notar por
(también se
suele notar por ![]() ), etc. Así pues, otra forma
de escribir el polinomio
), etc. Así pues, otra forma
de escribir el polinomio ![]() es
es  En
definitiva, la fórmula de Newton para el polinomio de interpolación de Lagrange
se escribe en forma compacta como
En
definitiva, la fórmula de Newton para el polinomio de interpolación de Lagrange
se escribe en forma compacta como  sobreentendiendo que
sobreentendiendo que 
Además de la progresividad en el cálculo que posibilita la expresión (ec09.3), la evaluación del polinomio en la forma de Newton es
menos costosa que en la de Lagrange, pues los grados de los sumandos de la
representación de Newton aumentan desde ![]() hasta
hasta ![]() , mientras que siempre son
de grado
, mientras que siempre son
de grado ![]() en la
fórmula de Lagrange. Este hecho se reflejará en un mayor tiempo de cálculo
necesario para representar la gráfica del polinomio si se emplea la fórmula de
Lagrange.
en la
fórmula de Lagrange. Este hecho se reflejará en un mayor tiempo de cálculo
necesario para representar la gráfica del polinomio si se emplea la fórmula de
Lagrange.
Un ingrediente que falta para que el esquema de Newton sea sa-tisfactorio es simplificar el cálculo de las diferencias divididas, resultado que incluimos a continuación (ver [Gasca]).
Las diferencias divididas satisfacen las siguientes propiedades:
![]()
Si ![]() es
una permutación de
es
una permutación de ![]() , entonces se cumple
que
, entonces se cumple
que ![]() .
.
La segunda propiedad de la proposición anterior permite disponer de forma
cómoda los cálculos necesarios para hallar las diferencias divididas haciendo
uso de una estructura triangular. 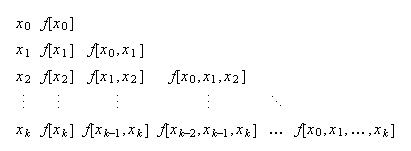
El error cometido en el punto ![]() ,
, ![]() ,
al interpolar una función
,
al interpolar una función ![]() mediante el polinomio
mediante el polinomio ![]() es
es ![]() . El error es nulo en los
nodos de interpolación, pues
. El error es nulo en los
nodos de interpolación, pues ![]() ,
, ![]() De aquí
se deduce una propiedad de las diferencias divididas.
De aquí
se deduce una propiedad de las diferencias divididas.
Si ![]() y
y ![]() ,
, ![]() ,
, ![]() ,
, ![]() son
son ![]() puntos
distintos pertenecientes a dicho intervalo, entonces existe un punto
puntos
distintos pertenecientes a dicho intervalo, entonces existe un punto ![]() , comprendido
entre el menor y el mayor de los
, comprendido
entre el menor y el mayor de los ![]() , tal que
, tal que 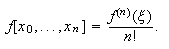
Demostración Podemos considerar los nodos de
interpolación ordenados: ![]() . Sea
. Sea ![]() el polinomio
que interpola a
el polinomio
que interpola a ![]() en dicho puntos. El error de
interpolación se anula, al menos, en
en dicho puntos. El error de
interpolación se anula, al menos, en ![]() puntos distintos. Entre
cada dos de ellos se anulará su derivada, al menos una vez (Teorema de Rolle).
Repitiendo el proceso, su derivada
puntos distintos. Entre
cada dos de ellos se anulará su derivada, al menos una vez (Teorema de Rolle).
Repitiendo el proceso, su derivada ![]() -ésima se anulará al menos
en un punto,
-ésima se anulará al menos
en un punto, ![]() , que
estará comprendido entre
, que
estará comprendido entre ![]() y
y ![]() . Por tanto,
como
. Por tanto,
como ![]() , se
cumple que
, se
cumple que ![]() . Pero
. Pero
![]() para todo
para todo ![]() . Entonces
. Entonces ![]() y se concluye el resultado
enunciado.
y se concluye el resultado
enunciado. ![]()
Un objetivo básico al tratar con la interpolación lagrangiana es controlar el error que se produce al aproximar el valor de la función interpolada por el de su interpolante, lo que requiere disponer de alguna estimación del mismo para funciones suficientemente regulares.
Demostración Evidentemente es cierto si ![]() coincide con algún nodo
coincide con algún nodo
![]() . En los demás
casos, si tratásemos de incorporar a
. En los demás
casos, si tratásemos de incorporar a ![]() como nuevo nodo de
interpoalción con la fórmula de Newton, para obtener el polinomio
como nuevo nodo de
interpoalción con la fórmula de Newton, para obtener el polinomio ![]() que interpola
en los
que interpola
en los ![]() nodos
iniciales y en el nodo
nodos
iniciales y en el nodo ![]() se tendría que calcular un
nuevo coeficiente
se tendría que calcular un
nuevo coeficiente ![]() o diferencia dividida
o diferencia dividida ![]() , cuyo valor es
, cuyo valor es  y de
ahí el resultado enunciado.
y de
ahí el resultado enunciado. ![]()
Como consecuencia de las proposiciones difdivyder y errorinterp, podemos enunciar el resultado relativo al error de interpolación.
Sean ![]() y
y ![]() ,
, ![]() ,
, ![]() ,
, ![]()
![]() puntos
distintos pertenecientes a dicho intervalo. Si
puntos
distintos pertenecientes a dicho intervalo. Si ![]() es otro punto de dicho
intervalo, entonces existe
es otro punto de dicho
intervalo, entonces existe ![]()
![]() tal que el error
en
tal que el error
en ![]() se
puede expresar como
se
puede expresar como 
Esta propiedad pone de manifiesto que en el error influyen tanto la derivada
![]() -ésima como la parte polinómica dependiente de los nodos. Es un
hecho inherente a la interpolación lagrangiana el que el error no se comporte
bien, en el sentido de que, cuando se toman nodos en número creciente en el
intervalo -incluso igualmente espaciados- de manera que el tamaño de la
partición inducida tienda a cero, el error no necesariamente tiende a cero. Ello
sucede aunque la función interpolada sea de clase
-ésima como la parte polinómica dependiente de los nodos. Es un
hecho inherente a la interpolación lagrangiana el que el error no se comporte
bien, en el sentido de que, cuando se toman nodos en número creciente en el
intervalo -incluso igualmente espaciados- de manera que el tamaño de la
partición inducida tienda a cero, el error no necesariamente tiende a cero. Ello
sucede aunque la función interpolada sea de clase ![]() en
en ![]() .
Más aún, Runge probó que si la función
.
Más aún, Runge probó que si la función 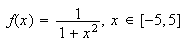 es interpolada en los puntos
igualmente espaciados
es interpolada en los puntos
igualmente espaciados ![]()
![]() , donde
, donde
![]() ,
mediante un polinomio
,
mediante un polinomio ![]() , entonces se verifica que
, entonces se verifica que
![]() cuando
cuando ![]() .
.
Surge así, de manera natural, la siguiente cuestión: ya que en la expresión
del error la derivada ![]() -ésima no es controlable, en
general, ?`sería posible encontrar un conjunto de nodos que minimicen el valor
de la parte polinómica del error? Entre todas las elecciones posibles de nodos,
los ceros del polinomio de Chebyshev de primer tipo de grado
-ésima no es controlable, en
general, ?`sería posible encontrar un conjunto de nodos que minimicen el valor
de la parte polinómica del error? Entre todas las elecciones posibles de nodos,
los ceros del polinomio de Chebyshev de primer tipo de grado ![]() relativo al intervalo
relativo al intervalo ![]() minimizan la expresión indicada. Además, si la función interpolada es de clase
minimizan la expresión indicada. Además, si la función interpolada es de clase
![]() y se
consideran, para cada
y se
consideran, para cada ![]() , los nodos de dicho
polinomio de Chebyshev, la sucesión de polinomios de interpolación converge, en
la norma del máximo, a la función interpolada. Sin embargo, en general, la
continuidad de la misma no es suficiente para asegurar la convergencia.
, los nodos de dicho
polinomio de Chebyshev, la sucesión de polinomios de interpolación converge, en
la norma del máximo, a la función interpolada. Sin embargo, en general, la
continuidad de la misma no es suficiente para asegurar la convergencia.
Nos podemos plantear la siguiente cuestión: ?`qué datos interpolaría un
polinomio escrito en la forma de Newton si hacemos tender un nodo hacia otro?
Por ejemplo, si en ![]() , siendo
, siendo ![]() , hacemos tender
, hacemos tender ![]() hacia
hacia ![]() , ?`qué ocurre?
Si
, ?`qué ocurre?
Si ![]() es derivable en
es derivable en
![]() se tiene
se tiene 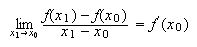 y, por
continuidad, debemos definir
y, por
continuidad, debemos definir ![]() .
.
Análogamente, si ![]() es de clase
es de clase ![]() y
y ![]() y
y ![]() tiende hacia
tiende hacia
![]() , debemos
definir
, debemos
definir ![]() para
que se extiendan por continuidad las propiedades de las diferencias divididas.
Los datos que aparecerían son el valor de
para
que se extiendan por continuidad las propiedades de las diferencias divididas.
Los datos que aparecerían son el valor de ![]() y el de sus primeras
y el de sus primeras ![]() derivadas en el punto
derivadas en el punto ![]() . Por tanto, la
definición
. Por tanto, la
definición 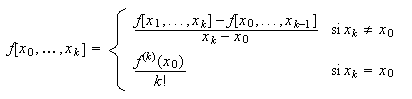 de las diferencias divididas en
nodos arbitrarios permite obtener el polinomio de interpolación de Taylor a
partir de la fórmula de Newton cuando todos los nodos coinciden en uno solo y,
análogamente, el polinomio de interpolación correspondiente al problema de
Hermite generalizado, cuando los nodos se agrupan de manera arbitraria. A
continuación mostramos un ejemplo, con un nodo simple y otro doble,
correspondiente a los datos
de las diferencias divididas en
nodos arbitrarios permite obtener el polinomio de interpolación de Taylor a
partir de la fórmula de Newton cuando todos los nodos coinciden en uno solo y,
análogamente, el polinomio de interpolación correspondiente al problema de
Hermite generalizado, cuando los nodos se agrupan de manera arbitraria. A
continuación mostramos un ejemplo, con un nodo simple y otro doble,
correspondiente a los datos 
La tabla de diferencias divididas se forma fácilmente: 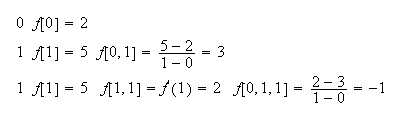 Por
tanto, el polinomio que los interpola es
Por
tanto, el polinomio que los interpola es 
El paquete Mathematica contiene una orden capaz de calcular el interpolante polinómico correspondiente a datos tipo Hermite generalizado.Es
InterpolatingPolynomial[{{ nodo1,{dato11,dato12,...}, {nodo2,{dato21,dato22,...}}, .....}, variable ]
donde para cada uno de los nodos de interpolación hay que proporcionar una lista con los datos que se deben interpolar, así como indicar la variable del polinomio resultante.
Para el ejemplo precedente, el polinomio de interpolación, en la variable
![]() se calcula a partir
de la orden
se calcula a partir
de la orden  que es equivalente a
que es equivalente a 
En las páginas anteriores se ha pretendido poner de manifiesto que, aunque simples de analizar y fáciles de usar, los métodos de interpolación referidos presentan problemas de divergencia que obligan a actuar con precaución. Una forma de proceder consiste en cambiar de espacio interpolador y pasar a considerar las denomi-nadas funciones spline polinómicas, de grado bajo, que garantizan un comportamiento satisfactorio del error de interpolación. Dedicaremos un capítulo a ese tema, que se centrará fundamentalmente en los splines cúbicos.
Otro problema que surge al tratar la interpolación polinómica es que, aunque la función interpolada sea monótona -creciente o decreciente-, el interpolante polinómico puede no serlo. Lo mismo puede afirmarse en lo que respecta a la concavidad, la convexidad, la positividad, etc. En relación a estos problemas, las curvas de Bézier juegan un papel muy destacado y serán estudiadas posteriormente.
En ocasiones es lógico usar espacios de funciones diferentes de los
polinómicos y de los splines. Por ejemplo, si una función es de tipo periódico,
puede ser interesante interpolarla en un espacio de funciones trigonométricas:
si se conoce el valor de una función en ![]() nodos
nodos ![]() , existe un único polinomio
trigonométrico, es decir generado por las funciones
, existe un único polinomio
trigonométrico, es decir generado por las funciones ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
,
![]() ,
, ![]() ,
, ![]() ,
,
![]() , que la
interpola en dichos nodos. Es la interpolación
trigonométrica. En otras ocasiones es interesante interpolar una función
mediante cocientes de polinomios; es la interpolación
racional. Mathematica dispone de órdenes para resolver algunos
problemas tanto de interpolación trigonométrica como racional.
, que la
interpola en dichos nodos. Es la interpolación
trigonométrica. En otras ocasiones es interesante interpolar una función
mediante cocientes de polinomios; es la interpolación
racional. Mathematica dispone de órdenes para resolver algunos
problemas tanto de interpolación trigonométrica como racional.